A Squib by Nils Klowait and Maria Erofeeva*
[bg_collapse view=”button-red” color=”#ffffff” icon=”arrow” expand_text=”What’s a Squib?” collapse_text=”Hide this explanation” ]
In the EM/CA community, we all know the importance of “putting our work out there”: discussing our findings and impressions with other researchers is not only a way to avoid (or at least reduce) the risks of an individualistic analysis, but also, and above all, a precious resource for progressing and improving our work. Long before the publication in a journal, in the midst of the analytic process, collective scrutiny and discussions are fundamental practices to provide the researcher with suggestions, comments, references and even beneficial doubts.
For this reason, this section of the ISCA Forum Newsletter is dedicated to “squibs”: concise articles containing preliminary, in-process analyses in an EM/CA perspective. In this section, researchers can present their work-in-progress findings to the ISCA community in order to generate discussions and collect observations, suggestions, useful references and potential publication venues.
CALL FOR CONTRIBUTIONS
Would you like to share your in-process analysis to have some feedback? Send us your squib! Please note that your contribution should satisfy the following requirements: 1) not exceed 2000 words (2200 for non-English data); 2) contain one or two transcripts and relative preliminary analyses; 3) illustrate a phenomenon fitting within the existing framework of EM/CA analyses.
Please email your contribution to [email protected]
[/bg_collapse]
Virtual Reality Laboratory, Moscow Multimodality Research, Moscow School of Social and Economic Sciences, Russia
Introduction
The embodied turn in Ethnomethodology and Conversation Analysis (EMCA) (Goodwin, 2000; Mondada, 2016; Nevile, 2015) in many ways coincided with the material turn: with a greater focus on the interactional ecology came a renewed interest in the role taken by the material environment (Nevile, Haddington, Heinemann, & Rauniomaa, 2014). The way non-human entities may come into play during human interaction currently evolves in multiple branches, some of which are further or closer to the general concerns of EMCA. Put on an ontological gradient, objects may play the role of context, props, resource spaces, parts of the public substrate (Goodwin, 2018), sets of discrete affordances (Hutchby, 2001) and, finally, as autonomous interactants (Cooren, 2004; Latour, 1996).
Our research currently focuses on the low-ontology segment of the conceptualization of objects: how they may be interactionally deployed in combination with dissimilar entities such as talk, bodies, and gestures.
The Data
In response to the ongoing replication crisis in the social sciences (Open Science Collaboration, 2015), colleagues from the local Cognitive Research Laboratory (CRL) were searching for novel explanations for the failure of high-profile psychological research to consistently replicate.
During our frequent inter-lab interactions, we gradually converged on the idea that there may be unseen social forces—invisible to the psychologists, visible to sociologists—that may affect the replication procedure in unexpected ways. Since the CRL was running multiple experimental replications simultaneously, we agreed that it would be mutually insightful to record them on video.

We captured and analyzed 34 hours of recordings, with 17 distinct subject-experimenter interactions. The above still from the video shows the perspective from which the recording was made. To keep disruptions to a minimum, the experimenters were instructed to position the camera in such a way as to capture the greatest range of embodied conduct.((Our team decided against a multi-perspective recording, since that would introduce additional responsibilities during the experiment.))
The EEG experiment goes through several stages:
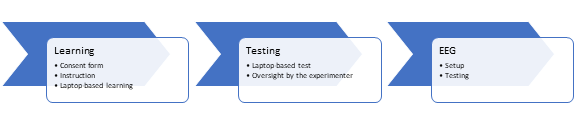
While our colleagues from the CRL did not consider the first two stages as part of the experiment proper, we chose to capture the greatest possible stretch of the interaction, from the moment the subject entered the room where the experiment was to be conducted, until the moment they left. Written informed consent was obtained from all participants.
The Emergence of Body Control as a Focal Point
The use of an EEG device necessitates a great deal of “unusual sensorial experiences” (Edmonds & Greiffenhagen, 2020), and in particular haptic interactions between the subject and the experimenter. Similar to the recent work by Edmonds and Greiffenhagen (2020), we aimed at considering how experimenters prepare the subject for haptic experimental manipulations.
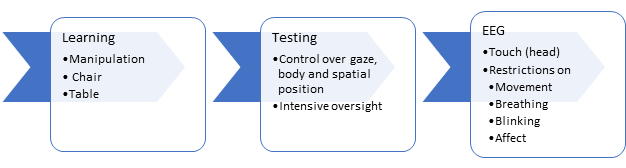
Since the experimental space is filled with various devices, screens, instruments and furniture, the management of the subject’s body becomes key to the successful organization of the activity. During the learning stage, the experimenter positions the subject at a designated spot in the laboratory. During the testing phase, the subject’s rotational freedom is constrained, with gaze-direction becoming a key element to be controlled. The need for body control is at its apex during the EEG-phase, where the subject has to remain practically motionless, with severe restrictions on head movement, breathing, blinking and, at times, their ability to express and feel nervousness. The experimenters frequently stressed that the subject should try to minimize both movement and emotional expression, sometimes followed-up with justifications like ‘this equipment is very expensive’ and ‘if you’re nervous, it will show in the data’.
Given the dramatic shift from impersonal interaction between strangers to substantial haptic manipulations of—and control over—the subject’s body, our preliminary question became: how is the renegotiation of corporeal boundaries accomplished to include intensive haptic manipulations between the experimenter and the subject?
The Surprising Dearth of Multimodality
When setting out to do this research, our team expected to find ample examples of how ‘legitimate touch’ was produced through the complex, multimodal, and sequential coordination of bodies and turns-at-talk. We specifically tried to find consistent instances of negotiated consent for haptic manipulation, be it verbally or through a combination of gaze and positioning. One early candidate for this kind of coordination was the consistently-repeating procedure for the first touch of the subject’s forehead, and the way a measuring tape figured as a way to gesturally announce the upcoming touch of the subject’s forehead, creating a nonverbal opening for a renegotiation of boundaries:

Yet, while these sequences were present in the data, it contains a surprisingly large number of instances where experimental touch occurs, but where an observable sequence of multimodal negotiation is notably absent.
This data-based insight forced a reconstitution of the research question: If a majority of performed bodily manipulations seemingly occur without persistent instances of negotiations with the subject, what are the resources available to the experimenter to delineate legitimate body control and touch?
Scrutinizing the Interactional Ecology
Our initial investigation focused on the way the human interactants accomplish a specific hapto-normative relationship with one another (Cekaite, 2016). When we shifted the investigation to include objects as interactionally-deployable, a possible explanation for the notably absent, multimodally-explicated negotiation of haptic boundaries emerges: the in-situ deployment of specific laboratory equipment aids the physical manipulation of the subject without direct contact. In other words, objects become haptic mediators by being deployed within the emerging sequence as an additional interactional resource:((Closed captioning is available in English. The full transcript is provided below.))
Deploying Mundane Objects for Practical Purposes
In the above sequence, two objects can be highlighted.
The chair

This is the type of chair used to seat the subject during much of the experiment. Three characteristics turn out to be interactionally relevant:
- The chair can be manipulated: The chair has a high back which makes it possible for the experimenter to find purchase on the chair, without having to haptically interact with the subject directly.
- The chair can be rolled with the subject in it: This makes it possible to adjust the position of the subject laterally, and without topicalizing this need.
- The chair can be rotated around its axis: This makes it possible to precisely set up an other-orientable direction of gaze and body angle.
One of the solutions demonstrated by the participants was the tactical deployment of a very specific table:
The table
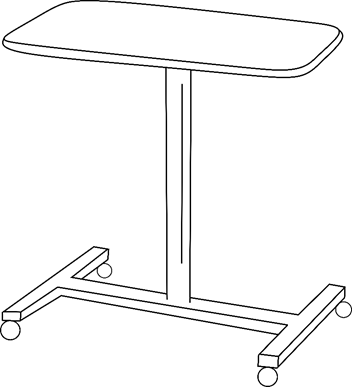
At specific stages of the experiment, the subject is supplied with a table on wheels. As it turned out, there are two interactionally relevant features of the table that interface with the problem of rotational-translational freedom afforded by the chair. Firstly, the table is portable. It can easily be lifted, moved, shifted. Secondly, the table has only one leg in the middle. This allows it to take part in the following maneuver:((The figures are aligned with the turn below. The arrow indicates the approximate temporal location. Simplified Leipzig Glosses are used for the transcript.))
The table can be positioned in front of the subject, and then adjusted in such a way as to position its single leg between the legs of the subject, thus preventing any major rotation from occurring. In line (1), E1 can be seen moving the chair without a prior announcement, whilst ‘fixing it in place’ verbally (1-3), linking noncompliance to the possibility of breaking the equipment((This is an instance of a recurring theme in the larger dataset: connecting noncompliance with references to financially or methodologically ruinous consequences.)). Despite the latter caution, the subject remains subtly mobile, especially in terms of rotation. The abovementioned table enters the scene (10) after a pre-announcement (7), and traces a line to the screen that the subject is to be oriented towards. This is explicated both verbally and gesturally (13), with a prolonged confirmatory sequence thereafter (14-18). The multimodal (table + gesture + talk) nature of the way orientation is ascertained may serve to highlight the importance of compliance. This is further reinforced when the rotational freedom of the subject is constrained by the table (21-26). The ‘locking’ procedure is coordinated by an iconic gesture (21) recreating the desired movement of the legs, and the concluding repositioning of the table (24). It is notable that the manipulation of the legs is accomplished without touch, while the table repositioning is performed by E1, even though it is produced in conjunction with an instruction for the subject to do so independently.
Thus, the chair is deployed as a means for the un-announced manipulation of a seated subject, while the table is strategically deployed during instances where the gaze direction/body orientation of the subject is topicalized, and where the rotational-translational freedom afforded by the chair might be problematic. The experimental situation creates the need for the management of attention and postural orientation on the part of the experimenter. Although touch is an inherent part of this setting, the institutional nature of the interaction makes its use problematic as a resource for social control (Cekaite, 2016). Instead, laboratory equipment is deployed in this role.
In lieu of a conclusion, some thoughts.
- While there are quite a few methodological issues with the theory of affordances (Erofeeva, 2019), and discussions around the material turn in general (Klowait, 2019), the casual treatment of material objects as purely functional entities can often overshadow their real-time deployment for practical purposes.
- Especially after the embodied turn, it becomes increasingly important to consider traditionally glossed spatial manipulation in greater detail.
- Following Goffman’s work on territories of the self (Goffman, 1971), we can highlight the importance of the way ‘rights to manipulate’ are distributed across interactants within a specific material environment. This concerns both haptic interaction between persons and the range of unsanctioned manipulation afforded to a given interactant over time.
- Objects can become part of an embodied interactional mesh, which in turn can be deployed in conjunction with talk. For instance, a chair + interactant assemblage may be combined with a ‘do not touch the equipment to the left of you, it costs a lot of money’.
- Something tricky is going on with the relationship between a pre-announcement of action and its deployment, since the order of these two may vary from situation to situation. This becomes especially relevant when matters of consent are raised.
References
Cekaite, A. (2016). Touch as social control: Haptic organization of attention in adult–child interactions. Journal of Pragmatics, 92, 30–42. https://doi.org/10.1016/j.pragma.2015.11.003
Cooren, F. (2004). Textual Agency: How Texts Do Things in Organizational Settings. Organization, 11(3), 373–393. https://doi.org/10.1177/1350508404041998
Edmonds, D. M., & Greiffenhagen, C. (2020). Configuring Prospective Sensations: Experimenters Preparing Participants for What They Might Feel. Symbolic Interaction. https://doi.org/10.1002/SYMB.485
Erofeeva, M. (2019). On multiple agencies: when do things matter? Information, Communication & Society, 22(5), 590–604. https://doi.org/10.1080/1369118X.2019.1566486
Goffman, E. (1971). Relations in public: Microstudies of the public order. Allen Lane.
Goodwin, C. (2000). Action and embodiment within situated human interaction. Journal of Pragmatics, 32(10), 1489–1522. https://doi.org/10.1016/S0378-2166(99)00096-X
Goodwin, C. (2018). Co-operative action. Learning in doing. Cambridge University Press.
Hutchby, I. (2001). Technologies, Texts and Affordances. Sociology, 35(2), 441–456. https://doi.org/10.1177/S0038038501000219
Klowait, N. O. (2019). Interactionism in the age of ubiquitous telecommunication. Information, Communication & Society, 22(5), 605–621. https://doi.org/10.1080/1369118X.2019.1566487
Latour, B. (1996). On Interobjectivity. Mind, Culture, and Activity, 3(4), 228–245. https://doi.org/10.1207/s15327884mca0304_2
Mondada, L. (2016). Challenges of multimodality: Language and the body in social interaction. Journal of Sociolinguistics, 20(3), 336–366. https://doi.org/10.1111/josl.1_12177
Nevile, M. (2015). The Embodied Turn in Research on Language and Social Interaction. Research on Language and Social Interaction, 48(2), 121–151. https://doi.org/10.1080/08351813.2015.1025499
Nevile, M., Haddington, P., Heinemann, T., & Rauniomaa, M. (Eds.) (2014). Interacting with objects: Language, materiality, and social activity. John Benjamins Publishing Company.
Open Science Collaboration (2015). Estimating the reproducibility of psychological science. Science, 349(6251), aac4716. https://doi.org/10.1126/science.aac4716
What a phenomenal website! Having loved reading your analysis on the interactions with (and through?) the chair, I do not think I will ever see my chairs in the same light again! Fascinating! The Jefferson Index is very handy also – thank you so much for assembling all these resources and sharing your findings, time and knowledge so generously!